[Reading] Deep Residual Learning for Image Recognition
Deep Residual Learning for Image Recognition (2015/12)
Contents
1. 概述
文章的主要贡献有:
- 分析了过深的网络性能反而变差的原因,提出了通过残差学习(residual learning)来解决劣化的方法,使得训练更深的网络变得更加容易。相比于直接学习目标映射,学习目标映射与输入的残差更容易进行优化。
- 提出了用于残差学习的基础结构 residual block,并针对较深的网络提出了 bottleneck 结构来降低计算量。这些结构在之后得到了大量应用。
- 基于 residual block 设计了 ResNet 网络架构,在当时的识别和检测等任务上达到了 SOTA 性能。
2. 劣化问题
对于深度神经网络来说,层数越多,表现力越丰富,通常来说也越容易在任务上得到更好的效果。但随着层数的增加,梯度消失和梯度爆炸的问题会越来越显著,使得网络更难收敛。文章提出的时候,已经有像 normalized initialization 和 intermediate normalization 等方法来解决梯度消失和梯度爆炸的问题。
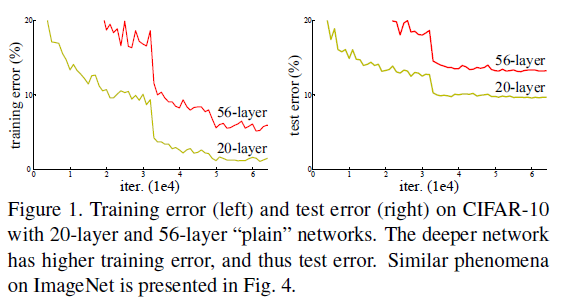
解决了梯度消失和梯度爆炸带来的难以收敛的问题后,人们发现网络性能仍会在层数过多时发生劣化:随着网络深度的增加,准确率会逐渐饱和,然后开始快速下降。这种劣化并不是过拟合造成的,实验表明,向深度适当的模型上增加更多的层,也会增加训练误差,如 Figure 1 所示。
这说明不同的系统有不同的优化难度,例如向一个浅网络上增加层数得到一个深网络,理论上可以通过特定的构造,使得深网络和浅网络表示相同的函数:只要让深网络多出来的层变成恒等映射,其它层与浅网络一致即可。这样一来,深网络的训练误差不会高于浅网络,但实验却得到了相反的结果,这说明当前的优化器或优化算法还无法有效地找到前述的构造方式。
3. 深度残差学习
3.1. 残差学习
为了解决劣化的问题,文章提出了深度残差学习(deep residual learning)框架,这里的残差指的是期望学习的目标映射和输入之差。考虑网络中相邻的一组层结构,记该结构需要学习的目标映射为 $\mathcal{H}(x)$,其中 $x$ 为结构第一层的输入,则残差 $\mathcal{F}(x) := \mathcal{H}(x) – x$,这里假设输入和输出具有相同的维度。此时目标映射可以写为 $\mathcal{H}(x) = \mathcal{F}(x) + x$。
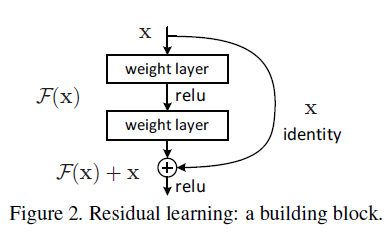
$\mathcal{F}(x) + x$ 可以通过 shortcut connection 来实现,对于叠加在一起的一组层结构,shortcut connection 通过将输入连接到输出,来跳过中间的层,如 Figure 2 所示。这里的 shortcut connection 不会对输入做任何处理,相当于一个恒等映射,因此也不会引入额外的参数和计算。注意 shortcut connection 的终点在 relu 之前。
学习残差不会影响网络的表达能力:如果认为多个非线性层可以近似目标函数,则这些层也可以近似残差函数。相比于直接学习目标函数,学习残差要更容易。残差学习相当于是将目标映射预设为恒等映射,在恒等映射 $x$ 的基础上学习一个额外的扰动 $\mathcal{F}(x)$。如果新加入的层能够表示恒等映射,则加入这些层后模型的误差不应高于原模型。当最优函数是恒等映射时,对于堆叠在一起的一系列非线性层,习得接近零的残差要比直接习得恒等映射更容易。即便实际场景中的最优函数通常不是恒等函数,如果最优函数接近恒等映射,学习基于恒等映射的扰动也会使优化更加容易。
文章通过实验发现,残差函数通常具有很小的响应,表明恒等映射是一个合理的预设。同时文章也通过在多个数据集上的试验,验证了残差网络即便在非常深的情况下也可以很容易地进行优化,训练误差比不使用残差的网络要低;大幅增加深度时,残差网络的准确率也可以不断增加。ResNet-152 是当时 ImageNet 上最深的网络,复杂度还要低于 VGG,且在多个任务上达到了 SOTA 性能。
3.2. Shortcut Connection
shortcut connection 会每隔若干层进行一次短路,构成一个 building block。如 Figure 2 中的 building block 短路了两层,可以表示为:
$$
y = \mathcal{F}(x \{W_i\}) + x \tag{1}
$$
其中 $x$ 和 $y$ 分别为 building block 的输入和输出,$\mathcal{F}(x \{W_i\})$ 表示要学习的残差映射,Figure 2 中有两层,有 $\mathcal{F} = W_2 \sigma(W_1 x)$,其中 $\sigma$ 为 ReLU 激活函数。$\mathcal{F} + x$ 表示通过 shortcut connection 进行的逐元素相加,注意这个相加发生在第二个 Relu 之前。
式 $(1)$ 所示的 shortcut connection 不会引入额外的参数,但要求 $x$ 和 $\mathcal{F}$ 具有相同的尺寸,如果二者尺寸不同,则可以引入一个额外的线性映射 $W_s$:
$$
y = \mathcal{F}(x \{W_i\}) + W_s x \tag{2}
$$
即便 $x$ 和 $\mathcal{F}$ 尺寸相同,也可以使用一个正方形矩阵 $W_s$ 来引入额外的变换,但实验证明恒等变换已经足够解决劣化问题,没有必要引入额外的计算量。
残差函数 $\mathcal{F}$ 由短路层数决定,文章主要实验了短路 2 到 3 层的情况。如果只短路 1 层,式 $(1)$ 相当于线性层 $y = W_1 x + x$,实验中并没有观察到任何优势。残差连接并不仅可以用于如式 $(1)$ 所示的全连接层,还可以用于卷积层。
4. 网络结构
4.1. 基本结构
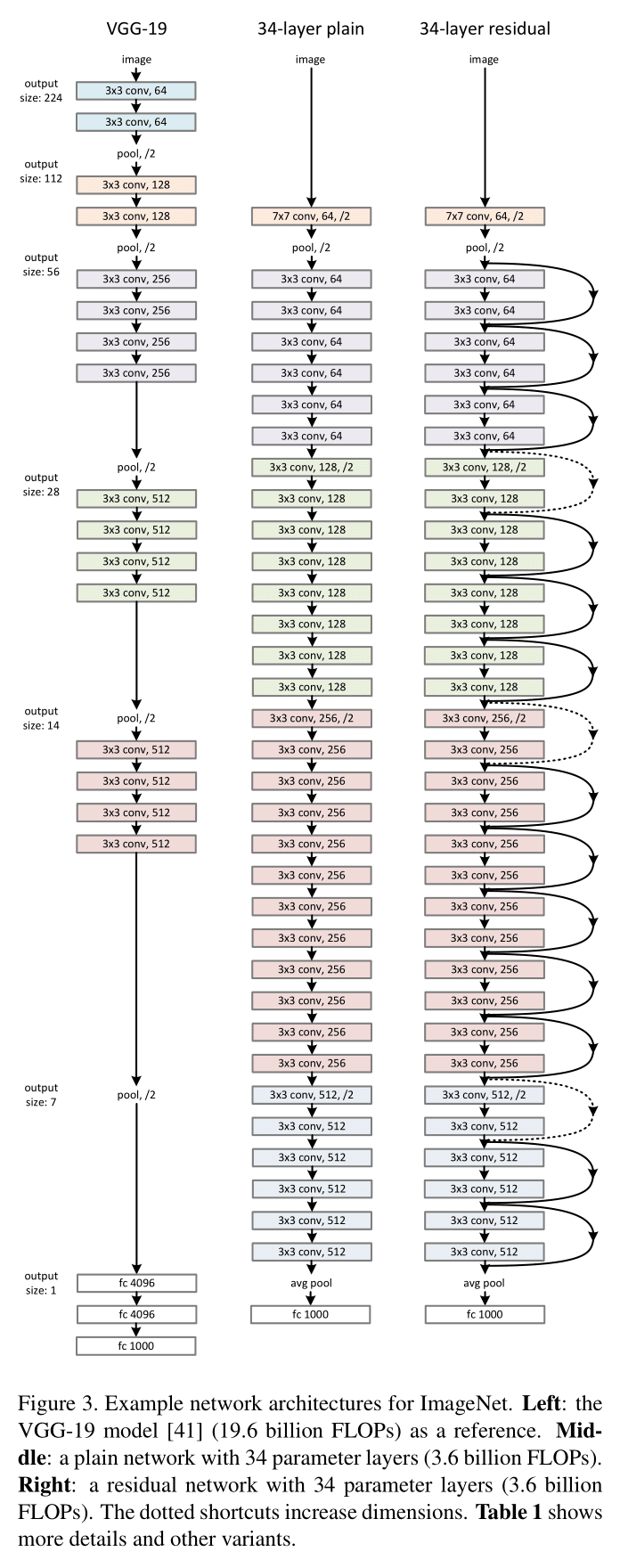
ResNet 的 baseline(Figure 3 中图)受到 VGG-19(Figure 3 左图)启发,使用 $3 \times 3$ 卷积,且:
- 输出特征图尺寸相同的层具有相同数量的过滤器;
- 如果特征图尺寸减半,则过滤器数量翻倍,来保持每层的计算复杂度。
baseline 的过滤器数量和计算复杂度要低于 VGG:VGG 需要 19.6B FLOPs,而 baseline 只需 3.6B FLOPs。
4.2. Shortcut
在 baseline 基础上插入 shortcut connection,得到 ResNet-34 如 Figure 3 右图所示。对于使用了 shortcut connection 的 block,如果输入和输出尺寸不同(Figure 3 右图中虚线),则有两种选择:
- shortcut 仍使用式 $(1)$ 的恒等映射,在增加的维度上补零;
- 使用如式 $(2)$ 的方式来匹配维度。
针对以上两种不同的 shortcut,文章进行了进一步的实验,包括三种方案:
- (A) 维度相同时使用式 $(1)$,维度增加则补零,没有额外参数。
- (B) 维度相同时使用式 $(1)$,维度增加则使用式 $(2)$。
- (C) 始终使用式 $(2)$。
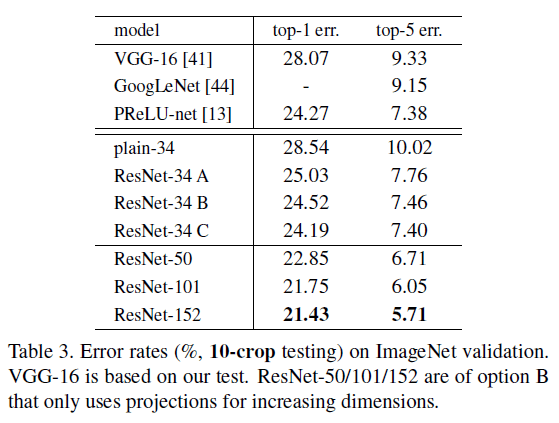
实验结果如 Table 3,可见方案 B 略优于 A,因为 A 中增加的维度没有参与残差学习;C 略优于 B,因为 C 引入了更多的参数。整体来看,三个方案的误差相差不大,从降低内存、时间复杂度和模型体积的角度,文章没有再使用方案 C。
4.3. Bottleneck
为了提高训练速度,对于较深的网络,文章给出了 deeper bottleneck 架构,使用三层作为残差函数 $\mathcal{F}$,如 Figure 5 右图所示,而不是 Figure 5 左图中的两层。三层分别使用 $1 \times 1$、$3 \times 3$ 和 $1 \times 1$ 卷积,其中前后两个 $1 \times 1$ 卷积分别负责降低和增加维度,使得 $3 \times 3$ 卷积在较小尺寸的 bottleneck 上进行计算。
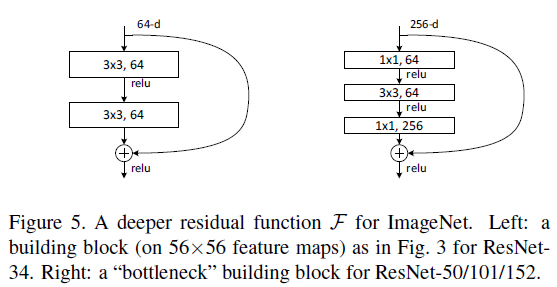
注意 Figure 5 中的 shortcut 使用的是恒等映射,图中的两个结构具有相似的时间复杂度。如果 Figure 5 右图中的 shortcut 使用了投影,因为 shortcut 连接了两个高维张量,时间复杂度和模型体积都会翻倍。
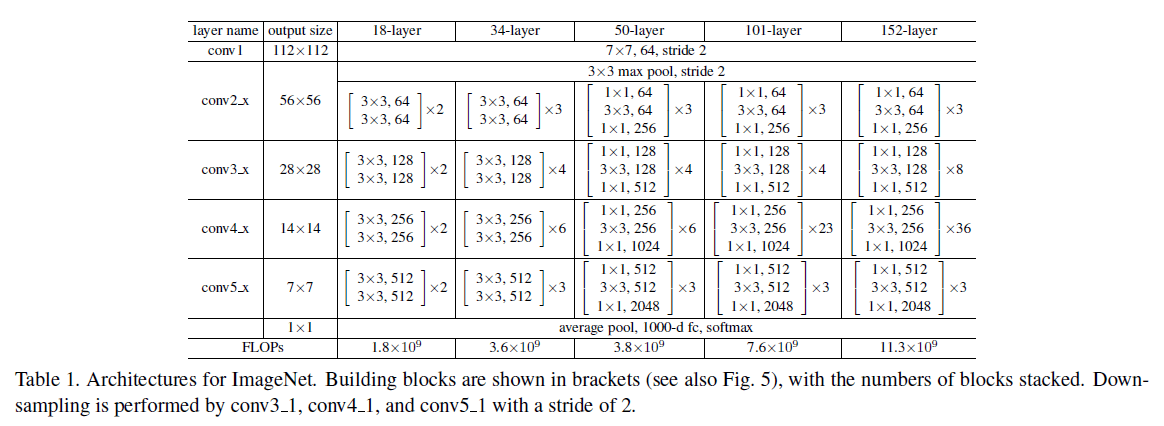
文章给出了多种深度的 ResNet。对于 ResNet-50,使用 Figure 5 右图所示的 3 层的结构替换 2 层结构,维度增加时使用方案 B,模型计算量有 3.8B FLOPs。对于更深的 ResNet-101 和 ResNet-152,使用了更多的 3 层结构,具体结构如 Table 1 所示。值得注意的是,虽然 ResNet-152 的层数非常多,但其计算量为 11.3B FLOPs,仍低于 VGG-16/19(15.3B/19.6B FLOPs)。
5. 实验结果
文章给出了 ResNet 在 ImageNet、CIFAR10 上的图像识别任务,以及在 PASCAL、MS COCO 上的目标检测任务的实验结果和分析。
5.1. 性能对比
在 ImageNet 图像识别任务中,文章尝试了如 Table 1 所示的不同深度的普通和残差网络,训练和验证误差如 Figure 4 所示。可以看到,对于 plain-18 和 plain-34,层数加深后,误差反而增大。为了排除梯度消失的影响,文章使用了 batch norm,并验证了前向和反向的信号没有消失。对于 ResNet-18 和 ResNet-34,层数加深后,误差随之降低,且 ResNet-34 的训练误差大幅低于 ResNet-18,在验证集上的泛化性能也更好,劣化问题得到了解决。

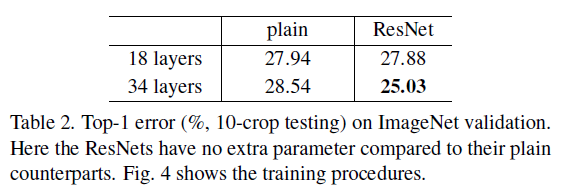
不同深度的 plain 和 ResNet 的 Top-1 error 如 Table 2 所示,可见 ResNet-34 具有最低的误差。plain-18 和 ResNet-18 的误差相近,说明对于较浅的网络,普通网络也可以获得较好的优化;由 Figure 4 可见,ResNet-18 收敛更快,说明 ResNet 使得优化更加容易。
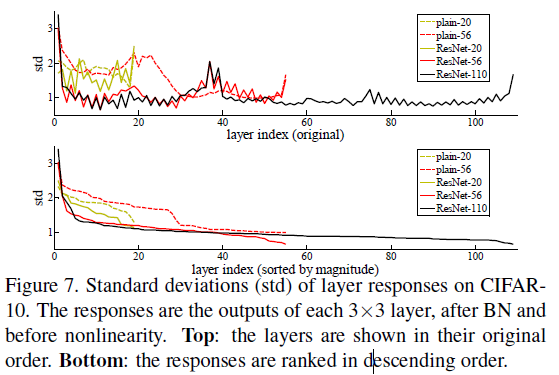
5.2. 响应分析
文章分析了 CIFAR-10 图像识别任务中各层响应的标准差,如 Figure 7 所示。这里的响应指的是 $3 \times 3$ 层在 BatchNorm 之后、非线性之前的输出。由于 ResNet 学习的是残差,图中可见 ResNets 的响应具有较小的标准差,支持了前面的观点,即残差函数通常比非残差函数更接近零。此外还可以发现,更深的 ResNet 响应的幅度更小,层数越多,每一层对信号的修改就越小。
5.3. 超过 1000 层
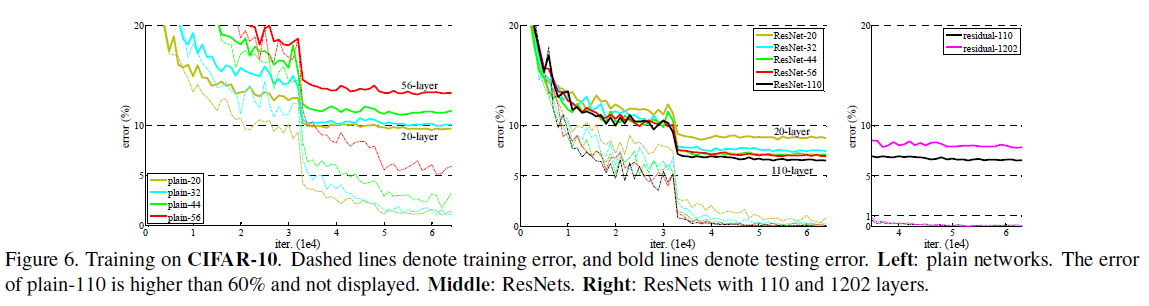
文章验证了超过 1000 层的网络的效果,如 Figure 6 右图所示。实际测试中使用了 1202 层的网络,可见其仍能保持较低的训练误差,与 110 层的网络相比,二者训练误差相近,但 1202 层的网络的测试误差要更大,文章认为对于所使用的数据集,1202 层的网络过于庞大,发生了过拟合。通过引入更强的正则化,可能会获得更好的效果。