[Reading] Rethinking the Inception Architecture for Computer Vision
Rethinking the Inception Architecture for Computer Vision (2015/12)
Contents
1. 概述
文章的主要贡献有:
- 给出了一系列网络设计原则来更有效地增大卷积网络,指出虽然增加网络尺寸和计算量可以有效提高性能,但在移动端等计算能力受限的场景下,保持计算量和参数数量也很重要。
- 以 Inception 模块为基础,通过使用分解卷积、辅助分类器、网格尺寸缩减等一系列技巧,确保增加网络规模时引入的额外计算量可以得到有效使用。
- 提出了 Inception-v2 和 Inception-v3 这两个高效的网络架构,达到了当时的 SOTA 性能。
- 提出了标签平滑正则化(Label-Smoothing Regularization,LSR),通过修改真实标签的分布来实现正则化。
2. 设计原则
文章通过大量实验,总结了一系列设计原则。
- 避免表征瓶颈(representational bottlenecks):在从输入到输出的计算过程中,应该逐渐减少表征的尺寸,避免出现过度压缩的瓶颈,尤其应避免在网络早期进行过度压缩。同时文章指出,表征的维度只能作为其中所含信息的一个粗略估计,因为没有考虑信息中的相关结构等重要因素。
-
更多的激活值有助于产生更分离(disentangled)的特征,提高网络训练速度。
-
在低维度嵌入上进行空间聚合并不会带来过多表征损失。例如在 $3 \times 3$ 卷积前可以先进行维度压缩,而不会带来严重的损失。
-
要平衡网络的宽度和深度。虽然单一增加网络的宽度和深度都可以带来性能提升,但平衡每一个 stage 的过滤器数量和网络深度,可以最有效地提升性能。
3. 分解卷积
通过将一个大尺寸的卷积分解为多个小尺寸的卷积,可以在保持感受野的前提下,大幅降低计算量。例如 GoogLeNet 中先通过 $1 \times 1$ 卷积压缩维度,再进行 $3 \times 3$ 卷积的结构,就可以看成是一种分解卷积。视觉网络中临近的激活值通常有较高的相关性,进行维度压缩并不会带来太大的损失。文章给出了多种对卷积进行分解的方法,以此来降低计算量和参数数量,有助于得到更加分离的参数和更快的训练速度,节省下来的计算量还可以用于进一步增加网络尺寸。
3.1. 分解为更小的卷积
较大过滤器尺寸的卷积计算量也较大,例如 $5 \times 5$ 卷积的计算量是 $3 \times 3$ 卷积的 $25 / 9 = 2.78$ 倍。$5 \times 5$ 卷积的尺寸更大,可以捕获更远距离的信号间的依赖,直接降低卷积尺寸会降低网路的表达能力。
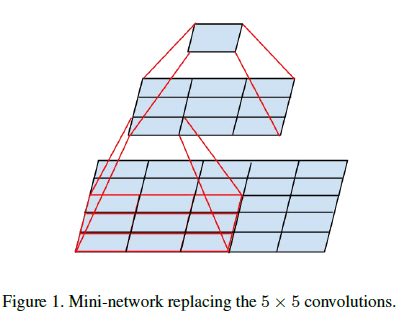
为了在保持表达能力的前提下降低卷积尺寸,可以使用两层 $3 \times 3$ 卷积,如 Figure 1 所示,这样可以保持 $5 \times 5$ 的感受野不变。假设输入和输出通道数分别为 $m$ 和 $n$,且有 $n = \alpha m$,通常输出通道数大于输入通道数,即 $\alpha> 1$。如果使用两层 $3 \times 3$ 卷积代替一层 $5 \times 5$ 卷积,那么每一层应该将通道数扩展为前一层的 $\sqrt{\alpha}$ 倍。这里假设 $\alpha = 1$,那么两层 $3 \times 3$ 卷积的计算量只有一层 $5 \times 5$ 卷积的 $\frac{9 + 9}{25} = \frac{18}{25}$。
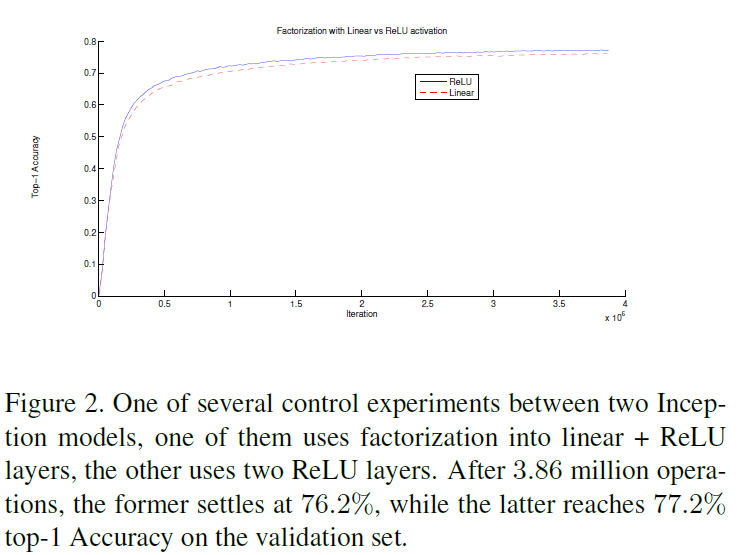
从分解的角度来看,将一层 $5 \times 5$ 卷积分解为两层 $3 \times 3$ 卷积,分解的是卷积层中线性的卷积计算,第一层 $3 \times 3$ 卷积似乎应该不需要非线性,只需使用线性激活函数。文章通过实验得知,两层 $3 \times 3$ 卷积都使用 ReLU 激活函数的性能要高于在第一层使用线性激活函数,如 Figure 2 所示,因为更多的非线性提到了网络的表达能力。
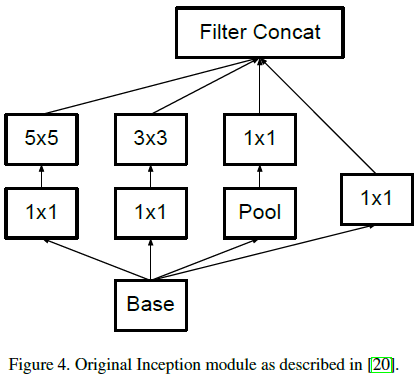
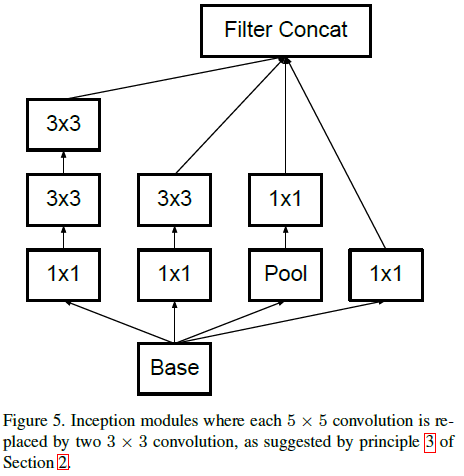
文章将 Figure 4 所示 Inception 模块的 $5 \times 5$ 卷积替换为两个 $3 \times 3$ 卷积,得到如 Figure 5 所示的结构。
3.2. 分解为非对称卷积
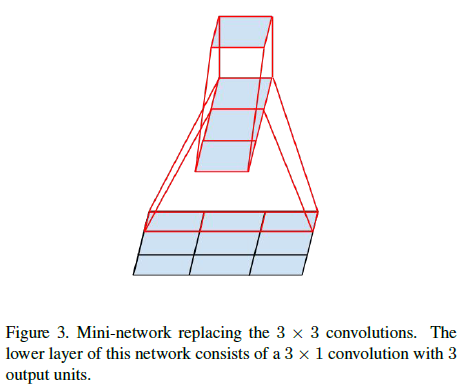
使用类似的方法,还可以将任意大于 $3 \times 3$ 的卷积表示为 $3 \times 3$ 甚至尺寸更小的卷积叠加的形式。例如使用 $3 \times 1$ 卷积和 $1 \times 3$ 卷积叠加,如 Figure 3 所示,其感受野相当于 $3 \times 3$ 的卷积,而计算量只有后者的 $\frac{3 + 3}{9} = \frac{2}{3}$。
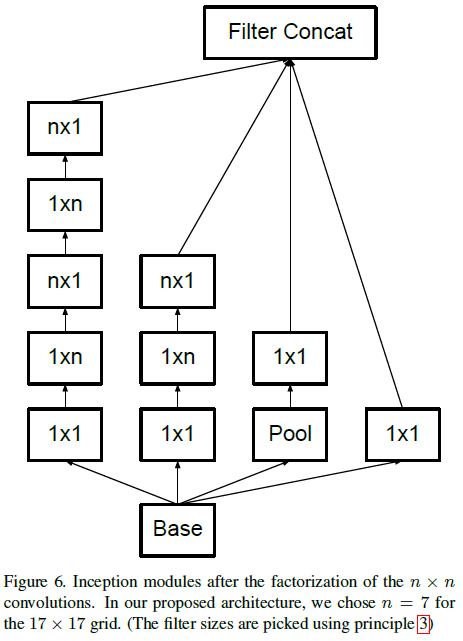
理论上,可以将任意 $n \times n$ 卷积分解为 $1 \times n$ 卷积和 $n \times 1$ 叠加的形式,$n$ 越大,节省的计算量越多。文章通过实验发现,在 $12 \times 12$ 到 $20 \times 20$ 的特征图上使用分解卷积,如 $1 \times 7$ 卷积后接 $7 \times 1$ 卷积,效果很好;而在网络靠前的层中使用分解卷积的效果并不理想。
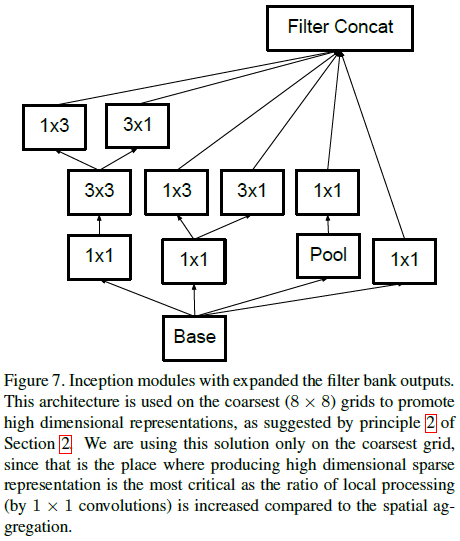
文章将 Inception 模块中的 $n \times n$ 卷积使用上述方式分解后,得到如 Figure 6 所示的结构。
4. 使用辅助分类器
GoogLeNet 通过在网络中间加入额外的辅助分类器,帮助训练时的梯度传播并加快收敛速度。本文发现辅助分类器并没有加快训练前期的收敛速度,而在训练末期,带辅助分类器的网络的准确率会高于不带辅助分类器的网络。
同时文章发现,对于 GoogLeNet 中使用的两个辅助分类器,移除较低的那个并不会影响最终网络的性能,说明该辅助分类器分支对底层特征并没有帮助。辅助分类器更多地起到了正则化的功能。
5. 高效网格尺寸缩减
在传统的卷积网络中,使用池化层来缩减特征图的尺寸,而为了避免产生表征瓶颈(representational bottleneck),在池化前通常会扩展通道数。例如对于 $d \times d \times k$ 的特征图,首先通过卷积将维度扩展到 $2k$,再通过池化将尺寸缩小到 $\frac{d}{2} \times \frac{d}{2}$,其中卷积的计算量较大,为 $2 d^2 k^2$。
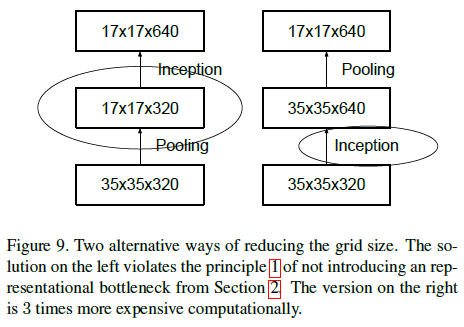
为了减少计算量,一种方法是将卷积和池化的位置调换,先进行池化缩小尺寸,再进行卷积扩大维度,如 Figure 9 所示。这种方法的计算量为 $2(\frac{d}{2})^2k^2$,只有原来的 $\frac{1}{4}$。但首先进行池化缩小尺寸会导致表征瓶颈,影响网络的表达能力。
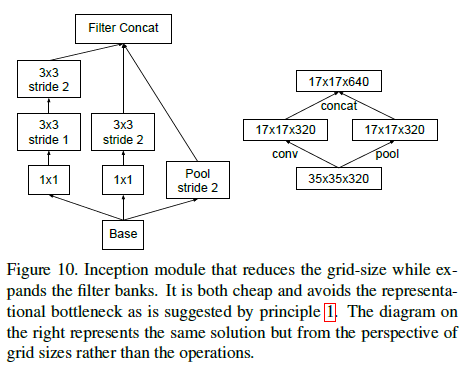
文章给出了一种缩减尺寸的高效方法,在不产生表征瓶颈的同时减少计算量。如 Figure 10 右图所示,将池化层 P 和卷积层 C 并行放置,二者的步长都为 2,再将输出拼接在一起。池化和卷积各自将特征图的长和宽减半,之后的拼接则使特征图的通道数翻倍。
6. Inception-v2 网络架构
结合前述的各种结构,文章给出了 Inception-v2 的网络架构如 Table 1 所示,其中用到了 Figure 5、6、7 中的结构。
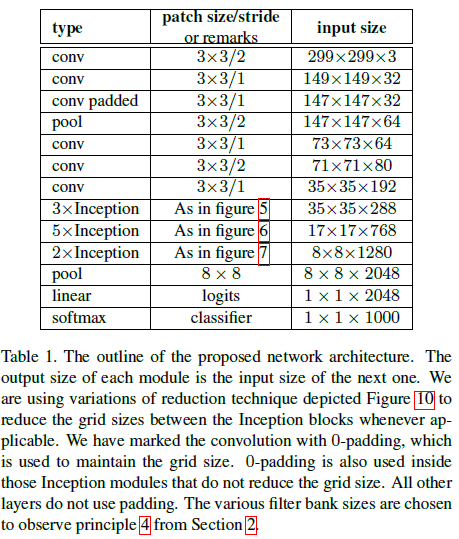
整个网络有 42 层,参数数量是 GoogLeNet 的 2.5 倍,但仍要比 VGGNet 更高效。
7. 通过标签平滑进行模型正则化
文章提出了一种通过修改真实标签的分布来实现正则化的方法,称为标签平滑正则化(Label-Smoothing Regularization,LSR)。
对于训练样例 $x$,模型输出的是每个标签 $k \in \{1…K\}$ 的概率分布,即
$$
p(k|x) = \frac{\mathrm{exp}(z_k)}{\sum\limits_{i=1}^{K}\mathrm{exp}(z_i)}
$$
其中 $z_i$ 是模型输出的未归一化的对数概率(logits)。记样本真实标签的分布为 $q(k|x)$,有 $\sum\limits_k q(k|x) = 1$,样本的交叉熵损失为
$$
l = -\sum_{k=1}^K \log(p(k)) q(k)
$$
对于样本只有单个真实标签 $y$ 的情况,有
$$
q(k) =\begin{cases}
1, & k = y \\
0, & k \neq y
\end{cases}
$$
此时最小化样本的交叉熵损失相当于最大化 $\log(p(y))$,即模型输出正确标签的对数概率,这要求 $q(k) = \delta_{k, y}$,其中 $\delta_{k, y}$ 为狄拉克 $\delta$ 函数,当 $k = y$ 时 $\delta_{k, y} = 1$,否则 $\delta_{k, y} = 0$。对于有限的 $z_k$,这一最大化无法达到,但可以通过 $z_y \gg z_k, \forall k \neq y$ 近似,即模型输出的真实标签的概率远大于其他标签,这会让模型对自己的预测过于有信心。另一方面,如果模型将全部概率都分配给每个训练样例的真实标签,会导致过拟合,影响泛化能力。
文章提出了一种方法,来降低模型对自身预测的信心。具体来说,对于训练样例的真实标签 $y$,修改其标签分布 $q(k|x) = \delta_{k, y}$ 为
$$
q'(k|x) = (1 – \epsilon) \delta_{k, y} + \epsilon u(k)
$$
$q'(k|x)$ 是真实标签的分布 $q(k|x)$ 和一个固定分布 $u(k)$ 的加权平均,权重分别为 $1 – \epsilon$ 和 $\epsilon$。即对于样本标签,有 $1 – \epsilon$ 的概率来自真实标签,有 $\epsilon$ 的概率来自 $u(k)$。文章中使用了均匀分布作为 $u(k)$,即 $u(k) = 1 / K$,此时
$$
q'(k) = (1 – \epsilon) \delta_{k, y} + \frac{\epsilon }{K}
$$
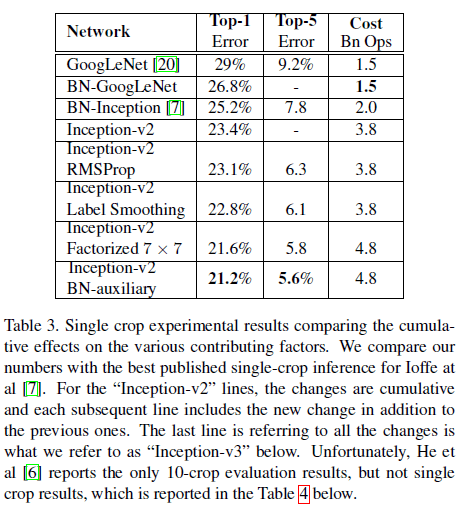
对于 ImageNet 的 1000 个分类,设定 $K = 1000$,即 $u(k) = 1 / 1000$,同时取 $\epsilon = 0.1$,在 ILSVRC 2012 的 top-1 和 top-5 错误率中获得了大约 0.2% 的改善,如 Table 3 所示。
8. 实验结果
文章给出了 Inception-v2 在 ILSVRC 2012 中的性能如 Table 3 所示,可见最后一行的配置具有最优的性能,文章将其称为 Inception-v3。
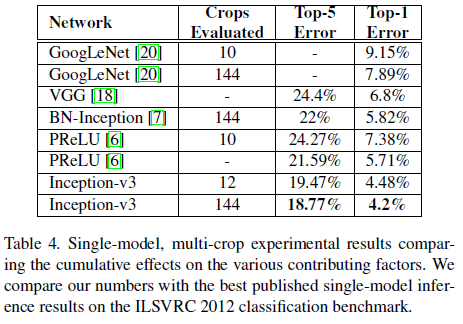
文章还比较了 Inception-v3 使用 multi-crop 的性能如 Table 4 所示。可见 Inception-v3 具有当时最优的性能,且 top-1 错误率几乎只有 GoogLeNet 的一半。