[Reading] Rich feature hierarchies for accurate object detection and semantic segmentation
Rich feature hierarchies for accurate object detection and semantic segmentation (2013/11)
Contents
1. 概述
文章的主要贡献有:
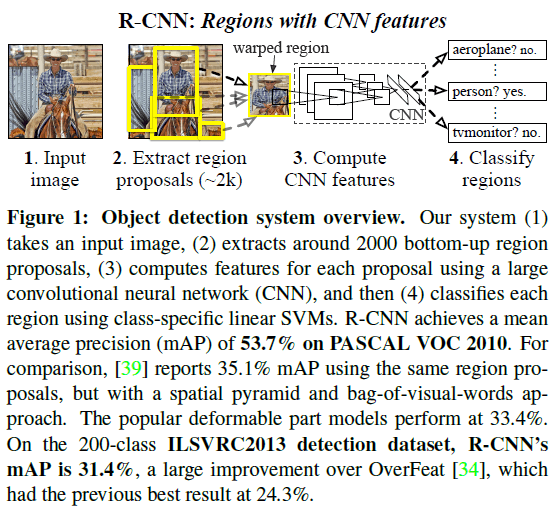
- 提出了一种将卷积神经网络(CNN)用于目标检测的方法,称为 R-CNN(Regions with CNN features)。先通过 selective search 生成一系列候选区域(region proposal),然后再使用 CNN 对候选区域进行特征提取,接着使用 SVM 对提取到的特征向量进行分类。
- 提出了一种在数据不足的情况下训练高容量 CNN 的方法。先在较大的辅助数据集上进行有监督的预训练,再在较小的目标数据集上进行微调。
- 使用边界框回归(bounding-box regression)对预测的边界框进行进一步微调,提高定位的精度。
针对目标检测任务,文章提出了两点洞察:
- 可以在候选区域上,使用高容量的 CNN 来对目标进行识别和分割;
- 带标记的数据不足时,可以先在辅助问题上进行有监督的预训练,再在领域特定问题上进行微调(fine-tuning),可以显著提升效果。
由这两点洞察,文章结合候选区域和 CNN,提出了一种称为 R-CNN 的目标检测算法,其性能较之前最佳算法有了大幅提升。
在目标检测问题中,要对目标进行识别和定位。解决定位问题的一种方法是将其看成是回归问题,但这在实践中效果不佳;另一种方法是使用滑窗(sliding-window),而在 CNN 中,高层的感受野非常大,滑窗步长对应原图的像素间隔也很大,使用滑窗难以进行精确定位。
为解决定位问题,文章提出的方法是使用区域进行识别。在测试时,先对输入图像生成约 2000 个类别无关的候选区域,再通过 CNN 从每个区域中提取固定长度的特征向量,最后使用类别相关的线性 SVM 对候选区域进行识别。每个候选区域可能有不同的尺寸,而 CNN 的输入尺寸是固定的,文章通过简单的仿射图像变形(affine image warping)来将候选区域图像调整至 CNN 的输入尺寸。
目标检测问题的另一个挑战是标记数据太少,不足以训练 CNN。针对此种情况的一般做法是先使用无监督的预训练,再使用有监督的微调。文章使用的方法是先在一个很大的辅助数据集(ILSVRC)上进行有监督的预训练,然后再使用小数据集(PASCAL)进行领域特定的微调,获得了很好的效果,证明这是一种在数据不足的情况下训练高容量 CNN 的有效范式。
通过错误分析,文章指出 R-CNN 的主要错误模式为定位错误,通过添加一个简单的边界框(bounding-box)回归,可以大幅降低定位错误。
R-CNN 也存在一些不足之处,成为之后改善的主要方向,包括:
- CNN 的输入尺寸是固定的,而候选区域具有不同的尺寸,将候选区域通过仿射变换调整到固定尺寸,会让图像发生扭曲。
- CNN 对每个候选区域独立地进行特征提取,效率较低。候选区域的重叠部分是可以共享计算的。
- 要对大量候选区域进行特征提取,数据量很大需要磁盘存储,效率较低。
- 整个检测流程包括候选区域生成、候选区域特征提取、SVM 分类、边界框回归多个步骤,训练和预测都比较复杂。
2. R-CNN
2.1. 模块设计
2.1.1. 候选区域
R-CNN 进行识别的第一步是生成候选区域。生成候选区域的方法有很多,且 R-CNN 对生成候选区域的方法不可知,并不依赖特定的方法。文章使用了选择性搜索(selective search)来生成候选区域。
2.1.2. 特征提取
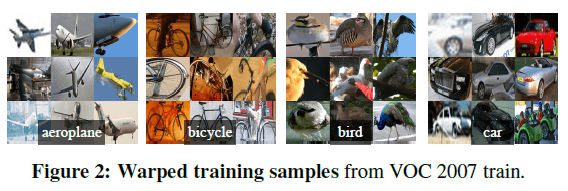
文章使用 AlexNet 对候选区域进行特征提取。将候选区域缩放至 $227 \times 227$ 像素的 RGB 图像后,通过 5 个卷积层和 2 个全连接层,得到长度为 4096 的特征向量。一些图像示例如 Figure 2。
2.2. 测试时检测
在测试时,先使用 selective search 在测试图像上生成约 2000 个候选区域,将区域尺寸变换为 CNN 输入尺寸后,通过 CNN 计算特征。对每个类别,训练一个 SVM 对 CNN 输出的特征向量进行打分。得到图像中所有区域的分数后,再对每个类别独立地使用 NMS(non-maximum suppression),即如果某个区域与具有更高分数的区域的 IoU(intersection-overunion)超过门限,则拒绝该区域。
文章指出,R-CNN 的计算效率体现在两方面:一是 CNN 的参数被所有类别共享,二是 CNN 输出的特征向量维数比当时的其他方法要低(UVA 检测系统的特征长度为 360k,R-CNN 为 4k,前者比后者大两个数量级)。实际中 R-CNN 检测一张图像的平均耗时为 13s(GPU)和 53s(CPU)。
2.3. 训练
2.3.1. 监督预训练
训练 CNN 时,文章首先在一个很大的辅助训练集(ILSVRC2012)上对 CNN 进行预训练。这个辅助训练集原本是用于图像识别的,只有图像级别的标注,没有位置信息,此时训练 CNN 进行图像识别。
2.3.2. 特定领域微调
之后再在新任务(检测)和新领域(变形后的候选窗)上对网络进行微调。此时需要将原 CNN 最后的 1000 路分类层替换为 $(N + 1)$ 路分类层($N$ 个对象类别,加一个背景类)。
此阶段对正例和负例(背景)的定义为:
- 所有与真实标注框(ground-truth box)的 IoU $\geq 0.5$ 的候选框作为正例;
- 其余为负例。
网络使用 SGD 进行训练,每轮迭代中,每个小批量(mini-batch)包含 128 个样本,由均匀采样的 32 个正例窗口和 96 个背景窗口构成。因为正例窗口比背景少得多,这里的采样偏向正例。
2.3.3. 目标类别分类器
文章指出,如果候选区域与真实标注框(ground-truth box)完全重叠,或者完全不重叠,可以明确地判断候选框中有/无目标物体。但对于与真实框部分重叠的候选区域,是否认为其中有目标物体是比较模糊的。文章通过将候选区域与真实标注框的 IoU 与一个门限比较,判断候选区域属于正例还是负例。通过网格搜索,找到了用于判断的最佳 IoU 门限为 0.3,于是得到此阶段对正例和负例(背景)的定义为:
- 只使用真实标注框作为对应类别的正例;
- 将与真实标注框的 $\mathrm{IoU} < 0.3$ 的候选框作为负例;
- 忽略其余($\mathrm{IoU} \geq 0.3$ 但非标注框)候选框。
有了 CNN 提取的特征和训练标签,文章为每个类别训练了一个线性 SVM 进行分类。
注意在特定领域微调和目标类别分类器两个阶段中,对正例和负例的定义不同。文章提到,在首先通过搜索确定了训练 SVM 时的最优正负例定义后,曾在 CNN 微调时使用同样的正负例定义,但发现效果没有现在好。文章的假设是微调时的数据十分有限,现在的定义通过将 IoU 在 0.5 到 1 的区域作为正例,引入了一些抖动,同时使得正例的数量增加了 30 倍,可以起到避免过拟合的作用。但文章同时指出,引入的带抖动的样本可能是局部最优的,导致网络没有在准确的位置上进行微调。
文章也尝试了在网络最后直接使用 21 路的 softmax 来分类,但这样导致网络在 VOC 2007 上的 mAP 从 54.2% 下降到 50.9%。文章认为此现象的原因是在进行 CNN 的微调时,训练样本中的正例并没有强调精确的定位,softmax 分类器在这些随机采样的负例上训练。而训练 SVM 时对负例的定义更严格($\mathrm{IoU} < 0.3$),是在难负例上训练的。
2.5. 网络性能
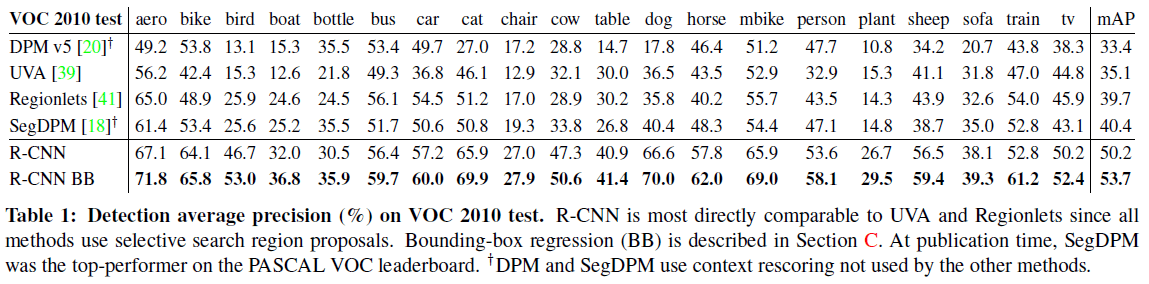
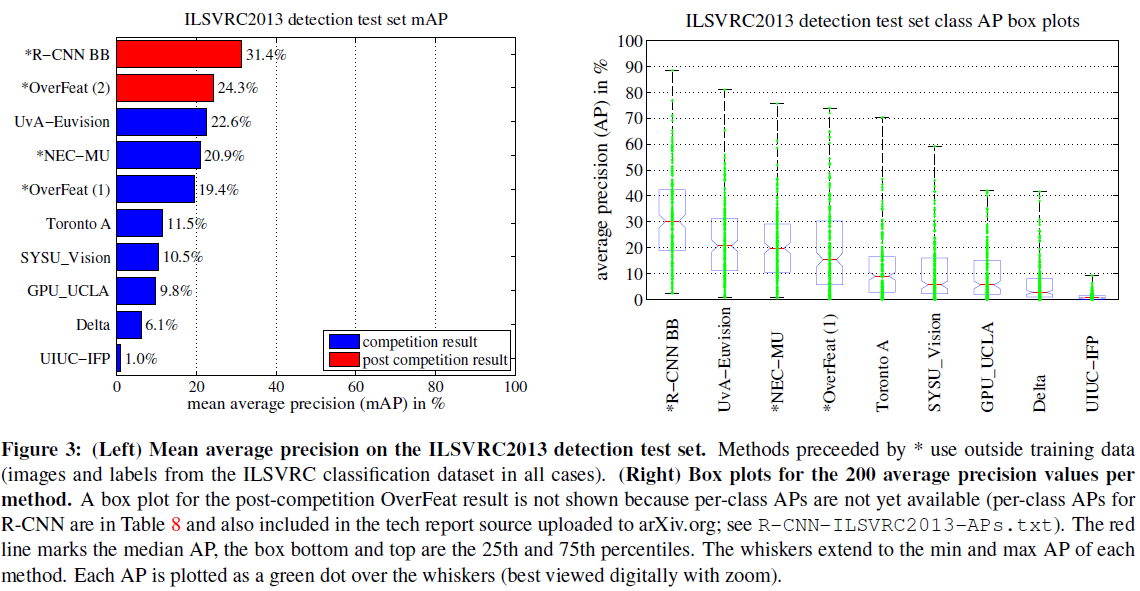
文章给出了网络在 PASCAL VOC 和 ILSVRC2013 的性能分别如 Table 1 和 Figure 3 所示。R-CNN 在 PASCAL VOC 的 mAP 达到了 53.7,与之前的最优算法相比有了大幅提升。
2.4. 网络架构选择
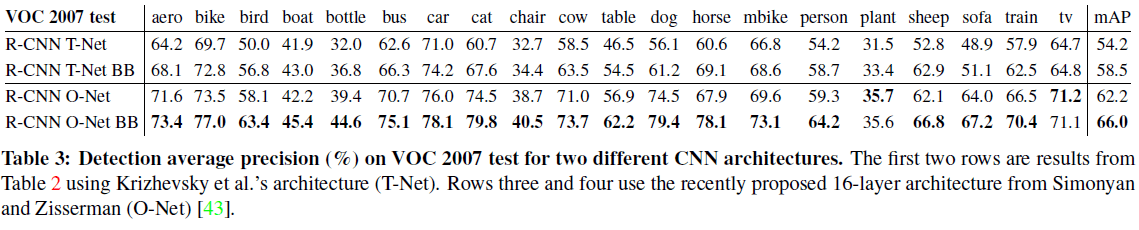
文章指出对 CNN 的架构选择会对 R-CNN 的检测性能产生大幅影响。R-CNN 中使用了 AlexNet(Table 3 中 T-Net),同时文章也比较了使用 VGG16 (Table 3 中 O-Net)的性能,如 Table 3 所示。
2.5. 边界框回归
通过错误分析,文章发现大部分错误都是定位错误。为了提高定位准确度,文章训练了一个线性模型,使用 $\text{pool}_5$ 的特征,为通过 selective search 得到的候选区域预测一个新的检测窗口。这一方法大幅降低了检测中的错误定位,将 mAP 提升了 3 到 4 个点。
具体来说,边界框回归的输入为 $N$ 对训练样本 $\{(P^i, G^i)\}$,$i = 1, \dots, N$,其中 $P^i = (P^i_x, P^i_y, P^i_w, P^i_h)$ 为候选区域 $P^i$ 边界框中心的像素坐标和宽高(后续省略上标 $i$)。标注框 $G$ 使用类似的定义,即 $G = (G^i_x, G^i_y, G^i_w, G^i_h)$。
边界框回归的目标是学习一种从候选框 $P$ 到真实标注框 $G$ 的变换。文章使用 4 个函数 $d_x(P)$、$d_y(P)$、$d_w(P)$、$d_h(P)$ 来描述这种变换:前两个函数表示对 $P$ 中心的尺度不变(scale-invariant)变换,后两个表示对 $P$ 宽高的对数空间变换。对 $P$ 的预测 $\hat{G}$ 为
$$
\begin{aligned}
\hat{G}_x &= P_w d_x (P) + P_x \\
\hat{G}_y &= P_h d_y (P) + P_y \\
\hat{G}_w &= P_w \exp(d_w (P)) \\
\hat{G}_h &= P_h \exp(d_h (P)) \\
\end{aligned}
$$
其中每一个 $d_*(P)$ 函数都是候选区域 $P$ 的 $\text{pool}_5$ 特征的线性函数,记为 $\phi_5(P)$,于是有 $d_*(P) = \mathrm{w}_*^\mathrm{T} \phi_5(P)$,其中 $\mathrm{w}_*$ 为可学习的模型参数,通过优化下述带正则的最小二乘目标(岭回归)得到
$$
\mathrm{w}_* = \underset{\mathrm{w}_* }{\mathrm{argmax}} \sum_i^N (t_*^i – \mathrm{w}_*^\mathrm{T} \phi_5(P))^2 + \lambda ||\mathrm{w}_*||^2
$$
对于训练样本 $(P, G)$,回归的目标 $t_*$ 定义为
$$
\begin{aligned}
t_x &= (G_x – P_x) / P_w \\
t_y &= (G_y – P_y) / P_h \\
t_w &= \log(G_w / P_w) \\
t_h &= \log(G_h / P_h)
\end{aligned}
$$
在实现过程中,文章发现了两个问题。首先,正则化非常重要,基于验证集,设置 $\lambda = 1000$。其次,需要注意训练样本 $(P, G)$ 的选择,如果 $P$ 和 $G$ 相距太远,学习 $P$ 到 $G$ 的映射不太实际,也没有意义。对于候选框 $P$,文章将其分配给与之 IoU 最大的 $G$,同时要求 $P$ 和 $G$ 的 IoU 要大于一个阈值(文章使用 0.6),否则丢弃 $P$。
测试时,对候选区域打分后,只通过边界框回归对其进行一次预测。虽然可以再对预测的边界框进行打分,迭代多次,但并没有带来效果提升。